Материалы по тегу: робот
|
16.10.2023 [22:21], Руслан Авдеев
Jtec Industries разработала тележку Server Rack Cart для перемещения полностью укомплектованных OCP-стоекПеремещение серверных стоек вместе с уже смонтированными серверами было бы слишком непростой задачей для грузчиков-людей, но решение есть — как сообщает The Register, на мероприятии Open Compute Summit представлена специальная тележка компании Jtec Industries, предназначенная для перемещения на значительные дистанции полностью укомплектованных стоек. Полностью загруженная стойка стандарта ORV2 или ORV3 весит порядка 1500 кг, поэтому для обычного грузчика безопасно переместить её с места на место непросто. Сама Jtec специализируется на моторизированных тележках, способных аккуратно перемещать объекты на складах, в том числе автономно. 
Источник изображения: Jtec Как считают в Jtec, среди гиперскейлеров уже имеется спрос на оборудование для перемещения новых и утилизируемых стоек в больших количествах. И Server Rack Cart вполне способна выполнять подобные миссии — перевозка осуществляется с помощью управляемого оператором или автономного транспортного средства. Поскольку Jtec является одним из партнёров в OCP, гиперскейлерам будет проще доверить своё дорогостоящее во всех отношениях оборудование складским роботам. В процессе транспортировки тележка с помощью специального механизма приподнимает стойку и может свободно перемещать её туда, куда необходимо. В процессе разработки Jtec сотрудничала с одним из разработчиков автономных транспортёров, а также с неназванным гиперскейлером, судя по всему, с Meta✴. Во всяком случае, именно в павильоне последней на OCP Summit можно увидеть оборудование Jtec. Как сообщают в Jtec, прототипы успешно внедрили и теперь они работают в нескольких ЦОД гиперскейлера, но пока продукт ожидает финального тестирования безопасности эксплуатации. Первое внедрение готовых продуктов должно состояться в IV квартале 2023 года.
15.10.2023 [14:41], Руслан Авдеев
Роботам — ЦОД: новая команда Microsoft займётся автоматизацией дата-центров и внедрением в них робототехникиMicrosoft планирует создать целую команду для исследований, связанных с автоматизацией ЦОД и разработкой роботов для их обслуживания. Как сообщает Datacenter Dynamics, компания ищет управляющего, специализирующегося на аппаратной автоматизации и являющегося экспертом по робототехнике. В описании вакансии указывается, что новый управляющий сыграет ключевую роль, определяющую будущее работы ЦОД. Успешный кандидат будет отвечать за управление средой, в которой будут «процветать инновации». При этом работа команды должна будет соответствовать более общим организационным целям компании и стандартам качества с соблюдением дедлайнов. 
Источник изображения: kalhh/pixabay.com Новость появилась через месяц после сбоя Microsoft Azure в Австралии, в котором частично винят плохую автоматизацию. Сбой в энергоснабжении привёл к сбоям в охлаждении. Поскольку на объекте оказалось недостаточно персонала для перезагрузки оборудования, автоматика отключила серверы для их защиты от перегрева. Если бы системой была предусмотрена перезагрузка охлаждающих модулей, этого удалось бы избежать. Позже в Microsoft заявили, что рассматривают оптимизацию автоматики. Ожидается, что следующую волну автоматизации и роботизации возглавят гиперскейлеры. При этом, как отмечают в Google, несмотря на схожесть ЦОД со складами, где роботы используются уже давно, применение робототехники на объектах IT-инфраструктуры намного сложнее, чем в других отраслях. Компания уже использует роборуку для помощи в утилизации жёстких дисков, но считает, что добавление машин в здания с традиционным персоналом чревато повышением травмоопасности. У Meta✴ с 2019 года имеется собственное подразделение Site Engineering Robotics Team для создания робототехники, призванной автоматизировать и масштабировать ряд операций в ЦОД. Судя по имеющимся вакансиям, команда всё ещё действует и ищет людей, способных разрабатывать архитектуру роботизированных систем, включая робоманипуляторы, а также готовых возглавить интеграцию манипуляторов в мобильные роботизированные платформы. Компания уже экспериментировала с механическим манипулятором для перекоммутации сети. 
Источник изображения: geralt/pixabay.com Amazon предпочитает не распространяться о собственных проектах в этой сфере, но десятилетиями инвестирует в разработку роботов для электронной коммерции и скупает другие компании в этой сфере. Компания уже внедрила более 750 тыс. роботов на торговых складах. При этом некоторые данные свидетельствуют о том, что склады с роботами опаснее для людей, чем те, на которых автоматизация преимущественно отсутствует. Особого внимания заслуживают робособаки — как минимум Digital Realty, Novva, Oracle, и Scala тестировали их применение для патрулирования ЦОД для видеонаблюдения и сбора данных с помощью сенсоров. Впрочем, изучаются и другие форм-факторы — японская NTT представила простой мобильный торс с руками, который используется уже в 15 ЦОД, и работает над другими моделями. При этом одни планируют использовать роботов только для мониторинга, тогда как другие намерены хотя бы частично заменить ими персонал. Роботы могут быть полезными в разных типах ЦОД, включая малые дата-центры для периферийных вычислений, не имеющие постоянного персонала. В будущем, вероятно, робототехника будет активно применяться и на крупных объектах, где роботы и автоматика полностью заменят людей. Впрочем, тогда ЦОД будут подвергаться ещё большей критике, поскольку перестанут создавать даже рабочие места в местностях, где их будут строить.
23.05.2023 [19:36], Руслан Авдеев
Meta✴ лицензирует робота Bombyx, предназначенного для прокладки оптоволоконных интернет-кабелей по ЛЭПРобот Meta✴ Bombyx — это специальное устройство, способное прокладывать оптоволоконные кабели, передвигаясь по линиям электропередач. Bombyx переводится с латыни как «мотылёк шелкопряда». Разработка робота была начата Facebook✴ и ULC Robotics ещё в 2018 году. Теперь Meta✴ сделала ставку на сторонний бизнес, который готов взять реализацию проекта на себя — робота лицензируют для дальнейшей разработки японской IT-компанией. Лицензию получит японская Hibot, обладающая десятилетиями опыта в разработке роботов различного назначения. В компании уже заявили, что считают большой честью получение лицензии и намерены работать над проектом уже существующими партнёрами и теми, кто пожелает присоединиться к разработке. Робот Bombyx поддержит прокладку оптических линий в труднодоступных местностях, где проникновение интернета оставляет желать лучшего. 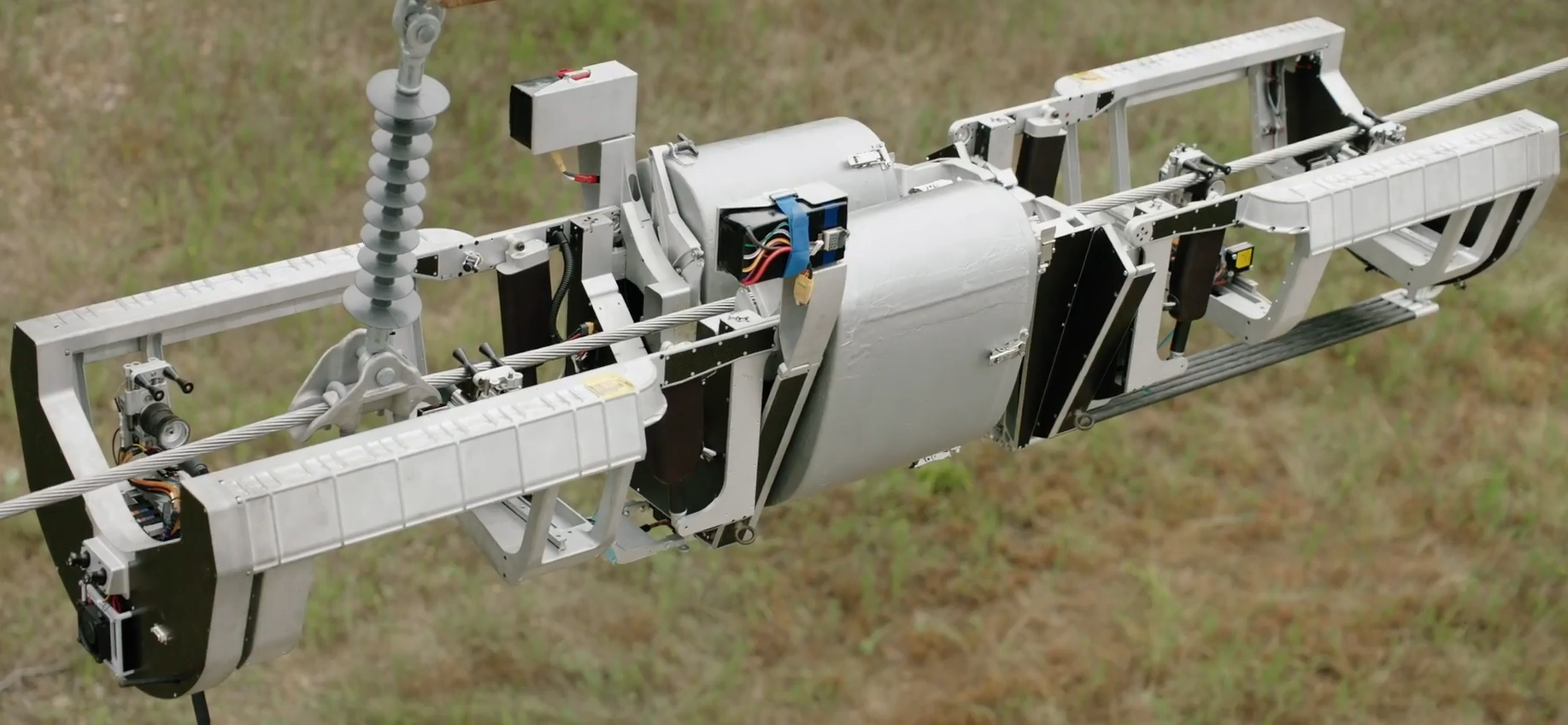
Источник изображения: Meta✴ В дополнение к возможности прокладки кабеля, Hibot будет использовать инновационные технологии Meta✴ для создания машины, пригодной для проверки уже существующей инфраструктуры и, возможно, для модернизации электросетей. Хотя оптоволоконные кабели являются недорогими и эффективным решением для создания информационных сетей, сама прокладка обычно обходится значительно дороже самого кабеля и представляет собой относительно сложный процесс. 
Источник изображения: Meta✴ В случае Bombyx кабель обвивается вокруг проводов на линиях электропередач. При этом снятие напряжения не требуется, а протяжённость кабеля может быть весьма велика. Правда, речь идёт о специальном кабеле в кевларовой рубашке, который значительно легче традиционных вариантов (менее 13 кг/км). Bombyx может преодолевать препятствия, используя механизмы машинного зрения и сенсоры для ориентации в пространстве.
22.04.2023 [00:15], Алексей Степин
Ловкость роборук: TopoOpt от Meta✴ и MIT поможет ускорить и удешевить обучение ИИТехнологии искусственного интеллекта (ИИ) сегодня бурно развиваются и требуют всё более серьёзных вычислительных мощностей. Но наряду с наращиванием этих мощностей растут требования и к сетевой подсистеме, поэтому крупные компании и исследовательские организации ищут всё новые способы оптимизации инфраструктуры. Компания Meta✴ в сотрудничестве с Массачусетским технологическим институтом (MIT) и рядом прочих исследовательских организаций опубликовала данные любопытного эксперимента, в котором ИИ-кластер мог менять топологию своего интерконнекта с помощью механической «роборуки». Система получила название TopoOpt, поскольку вычислительные узлы в ней использовали полностью оптическую сеть с оптической же патч-панелью. Эта сеть объединяла 12 вычислительных узлов ASUS ESC4000A-E10, каждый из которых был оснащён ускорителем NVIDIA A100, сетевыми адаптерами HPE и Mellanox ConnectX-5 (100 Гбит/с) с оптическими трансиверами. 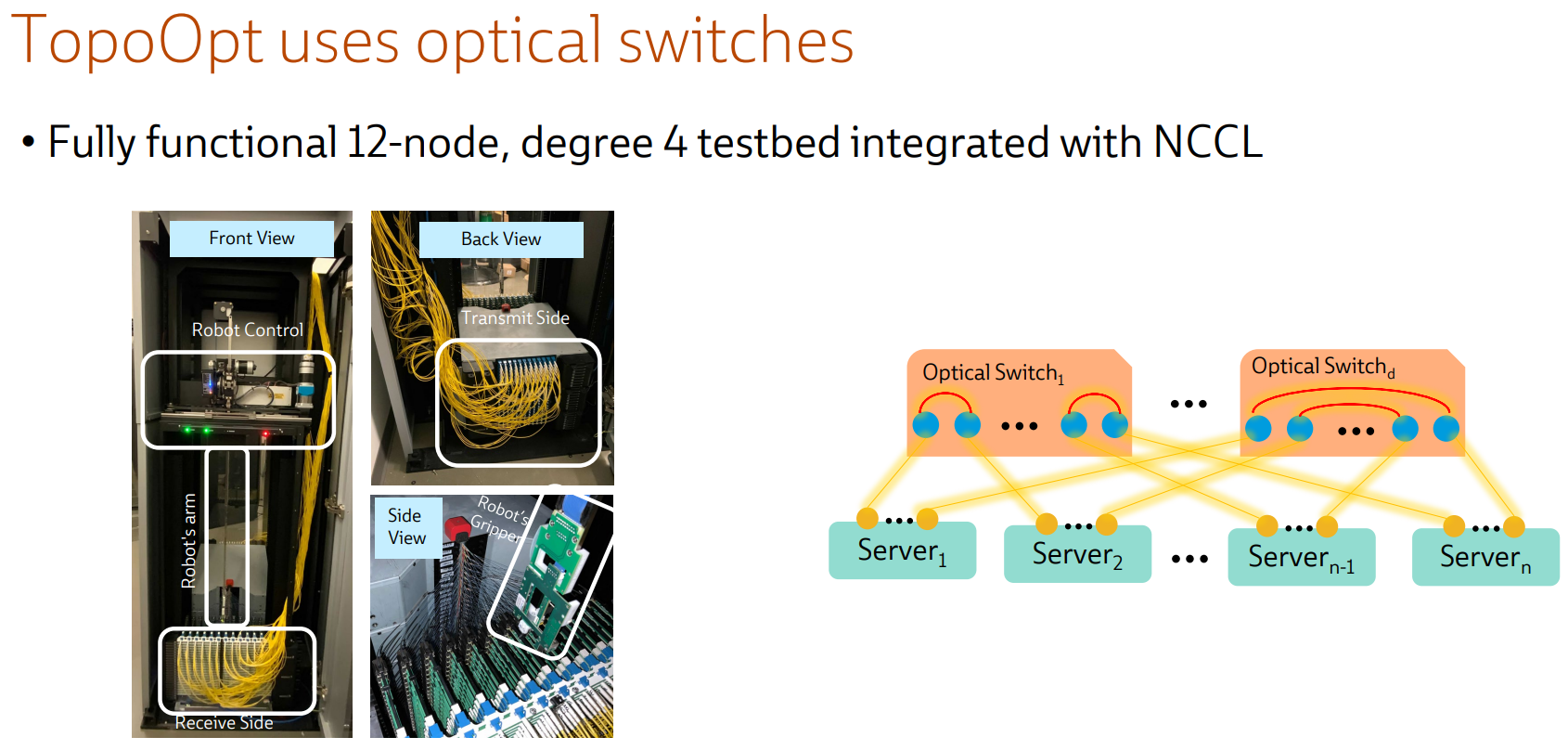
Источник здесь и далее: USENIX Наиболее интересное устройство в эксперименте — оптическая патч-панель Telescent, оснащённая механическим манипулятором, способным производить перекоммутацию на лету. Эта «роборука» работала под управлением специализированного ПО, целью которого ставилось нахождение оптимальной сетевой топологии и сегментации сети применительно к различным задачам машинного обучения. 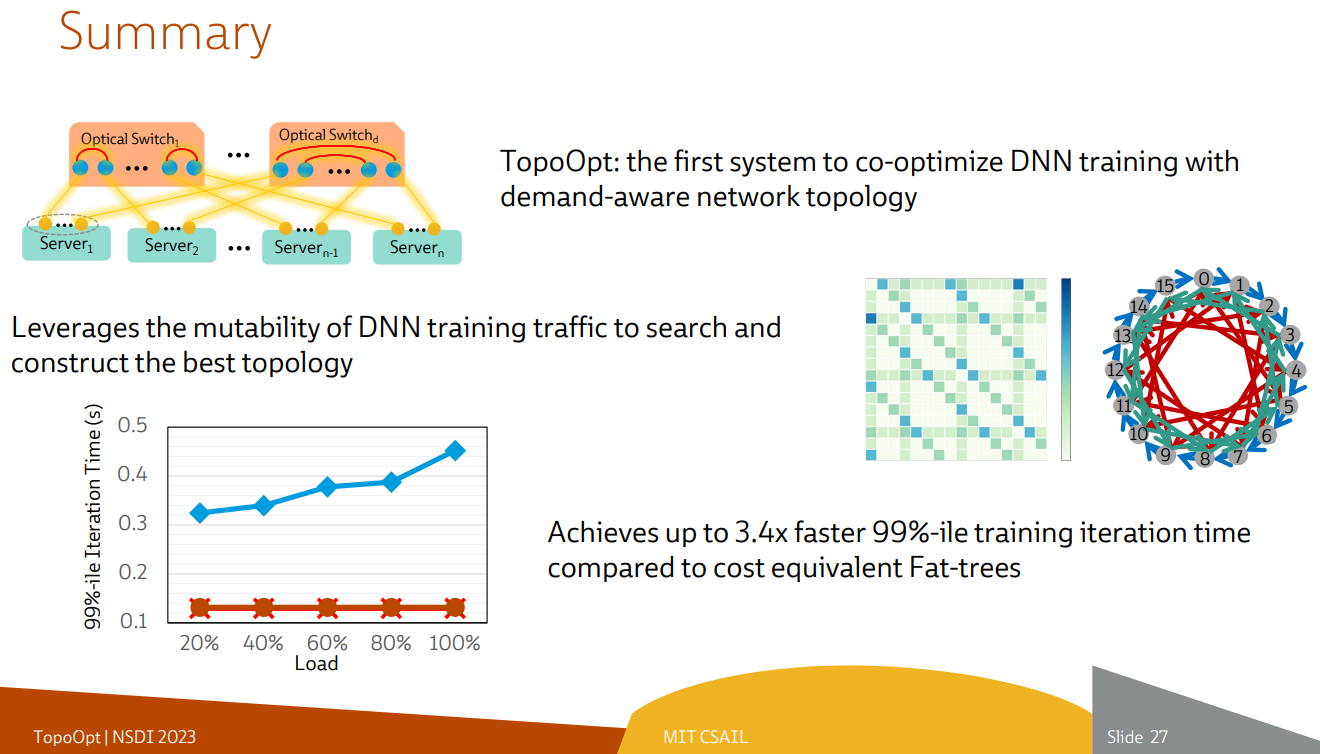
Система с перекоммутируемой оптической сетью не требует энергоёмких высокоскоростных коммутаторов и обеспечивает ряд других преимуществ Такая роботизированная патч-панель не столь расторопна, как оптические коммутаторы Google с микрозеркальной механикой, но стоит впятеро дешевле и имеет больше портов. Опубликованные экспериментальные данные уверенно свидетельствуют о том, что топология «толстого дерева» (fat tree), использующая несколько слоёв коммутаторов, не оптимальна и даже избыточна для ряда нейросетевых задач. К тому же перекоммутируемая оптическая сеть без традиционных высокоскоростных коммутаторов требует меньше оборудования, а значит, может быть не только быстрее сети fat tree в ряде ИИ-задач, но и существенно дешевле в развёртывании и поддержании в рабочем состоянии — как минимум за счёт отсутствия затрат на питание множества коммутаторов. |
|